Thomas Cohn
Robotics • Math • Computer Science
Computer Science PhD student at the Massachusetts Institute of Technology, advised by Russ Tedrake. Member of the Robot Locomotion Group.
CV (Last updated April 2026)
Research Blog
Featured Videos
Publications & Preprints
"SceneSmith: Agentic Generation of Simulation-Ready Indoor Scenes"
(Under review)
Nicholas Pfaff,
Thomas Cohn,
Sergey Zakharov,
Rick Cory,
Russ Tedrake
[
Preprint
]
[
Project Page
]
We present an automated agentic pipeline for generating simulation-ready scenes from only a natural language description, including fully automated asset generation and physical property estimation. These scenes can be used to safely evaluate robot foundation models at scale.
"A Framework for Combining Optimization-Based and Analytic Inverse Kinematics"
(Under review)
Thomas Cohn*,
Lihan Tang*,
Alexandre Amice,
Russ Tedrake
*Denotes equal contribution.
[
Preprint
]
We present a new formulation for optimization IK, utilizing an existing analytic IK solution as a change of variables. This eliminates the nonlinear IK constraint, leaving the optimizer free to focus on other challenging constraints like collision avoidance and (humanoid) static stability.
"How Well do Diffusion Policies Learn Kinematic Constraint Manifolds?"
Accepted: ICRA 2026 (Acceptance 38.04%)
Lexi Foland,
Thomas Cohn,
Adam Wei,
Nicholas Pfaff,
Boyuan Chen,
Russ Tedrake
[
Preprint
]
[
Project Page
]
We present a careful study of how well diffusion policies learn to follow constraint manifolds, as a function of the amount of data and how well the data obeys the constraint. We leverage a custom teleoperation setup to generate data that perfectly satisfies the constraint and include both simulation and hardware results.
This project also won best poster award at IROS 2025 Workshop on Robotic Data Generation and Evaluation
"Sampling-Based Motion Planning with Discrete Configuration-Space Symmetries"
Accepted: IROS 2025 (Acceptance 46.2%)
Thomas Cohn, Russ Tedrake
[
Preprint
]
[
Project Page
]
[
Code
]
We describe how to adapt sampling-based planning algorithms to work when the underlying configuration space has finite symmetries (which arises when a robot manipulates symmetric objects). Planners that leverage symmetries produce shorter paths and require less runtime.

"Planning Shorter Paths in Graphs of Convex Sets by Undistorting Parametrized Configuration Spaces"
RA-L
Shruti Garg,
Thomas Cohn, Russ Tedrake
[
Paper
]
[
Project Page
]
We extend GCS to handle nonconvex objectives, while maintaining feasibility guarantees. This is especially applicable for parametrizations of configuration space, used in bimanual manipulation and certifiably collision-free planning.
"Faster Algorithms for Growing Collision-Free Convex Polytopes in Robot Configuration Space"
Accepted: ISRR 2024 (Acceptance 56.58%)
Peter Werner,
Thomas Cohn*, Rebecca H. Jiang*, Tim Seyde, Max Simchowitz, Russ Tedrake, Daniela Rus
*Denotes equal contribution.
[
Preprint
]
[
Project Page
]
We present faster and more reliable algorithms for constructing convex collision-free polytopes in robot configuration space. These sets can then be used with for trajectory optimization with the Graph of Convex Sets framework.
A followup workshop paper won best workshop paper award at IROS 2025 Workshop on Frontiers in Dynamic, Intelligent, and Adaptive Multi-Arm Manipulation
"Constrained Bimanual Planning with Analytic Inverse Kinematics"
ICRA 2024 (Acceptance 44.83%, Best Paper in Robot Manipulation Finalist)
Thomas Cohn, Seiji Shaw, Max Simchowitz, Russ Tedrake
[
Paper
]
[
Project Page
]
We leverage analytic inverse kinematics to parametrize the constrained configuration space that arises when two robot arms grasp a common object. This simplifies the motion planning problem, allowing the use of standard sampling-based planners, trajectory optimizers, and the GCS planning framework with only slight modifications.
"Non-Euclidean Motion Planning with Graphs of Geodesically-Convex Sets"
RSS 2023 (Acceptance 31%, Best Paper Finalist) and IJRR
Thomas Cohn, Mark Petersen, Max Simchowitz, Russ Tedrake
[
Journal Article
]
[
Conference Paper
]
[
Project Page
]
[
Conference Presentation (RSS 2023)
]
We generalize the Graph of Convex Sets (GCS) framework for motion planning to handle non-Euclidean configuration spaces. In the zero-curvature case (encompassing mobile bases and continuous revolute joints), we provide optimality and collision-free guarantees via a reduction to a GCS problem. We demonstrate our results by producing whole-body plans for a PR2 mobile manipulator.
"Topologically-Informed Atlas Learning"
ICRA 2022 (Acceptance 43.1%)
Thomas Cohn, Nikhil Devraj, Odest Chadwicke Jenkins
[
Paper
]
[
Project Page
]
[
Conference Presentation (ICRA 2022)
]
[
Code
]
Topologically-Informed Atlas Learning extends manifold learning to handle data from topologically non-trivial manifolds, by partitioning the manifold into regions with no holes and separately embedding each region. Thus, it constructs an atlas of coordinate charts, preserving both the local and global topology. We use our atlas learning approach to reconstruct human motion and learn kinematic models for articulated objects.
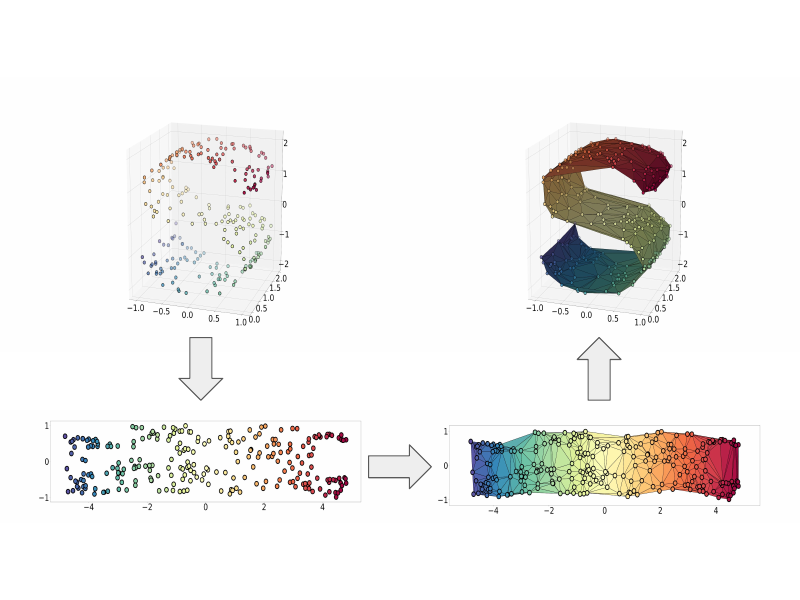
"TSBP: Tangent Space Belief Propagation for Manifold Learning"
RA-L + IROS 2020
Thomas Cohn, Odest Chadwicke Jenkins, Karthik Desingh, Zhen Zeng
[
Paper
]
[
Project Page
]
[
Conference Presentation (IROS 2020)
]
[
Code
]
TSBP is a neighborhood graph denoising technique to make manifold learning more robust to data sparsity and noise. We use belief propagation to estimate tangent spaces, and use that information to remove false edges. We apply our technique to simulated robot sensing data and tactile data.
Research Projects
Coordinate Chart Particle Filter for Deformable Object Pose Estimation
(2020-2021)
[
Project Page
]
[
Code
]
By learning a low-dimensional representation of deformable objects with manifold learning, we can then estimate their pose with a particle filter, where particles are constrained along the manifold to reduce the dimension of the search space.

Particle-Based Localization and Grasping of Grocery Bags
(2018-2019)
[
Project Page
]
[
Code
]
[
Video
]
We detect the handles of a paper grocery bag in a video feed, and then triangulate their 3D locations with a paricle filter while moving the robot in order to grasp the bag.
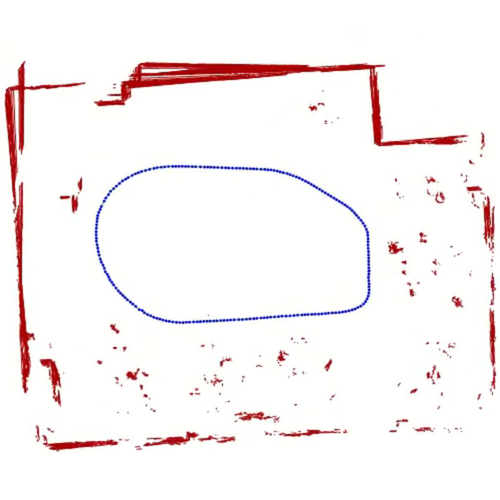
Simultaneous Localization and Mapping with Iterative Closest Point
(2016-2017)
[
Project Page
]
[
Code
]
By matching LIDAR scans with iterative closest point, a robot can construct a map of its surroundings while exploring an unknown environment.
Other Projects
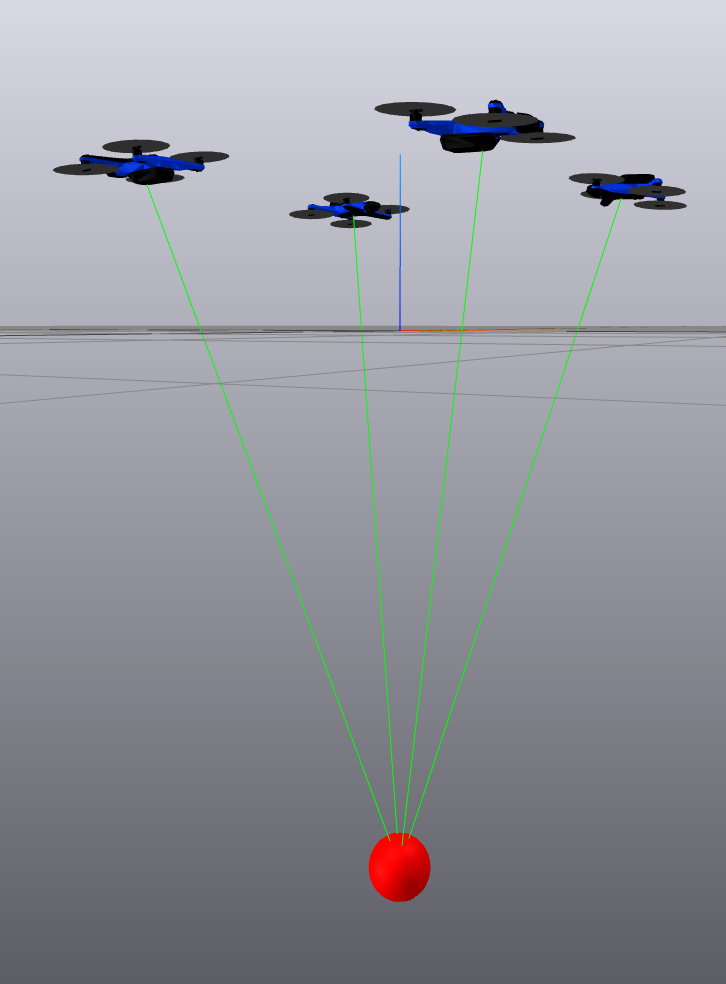
6.8210 (Underactuated Robotics) Final Project: Cooperative Shared-Load Carrying by Quadrotors
(2023)
[
Project Page
]
[
Project Writeup
]
[
Video Playlist
]
[
Code
]
With Seiji Shaw
Cooperative control (including stabilization and trajectory planning) of multiple quadrotors, tethered to a slung load.
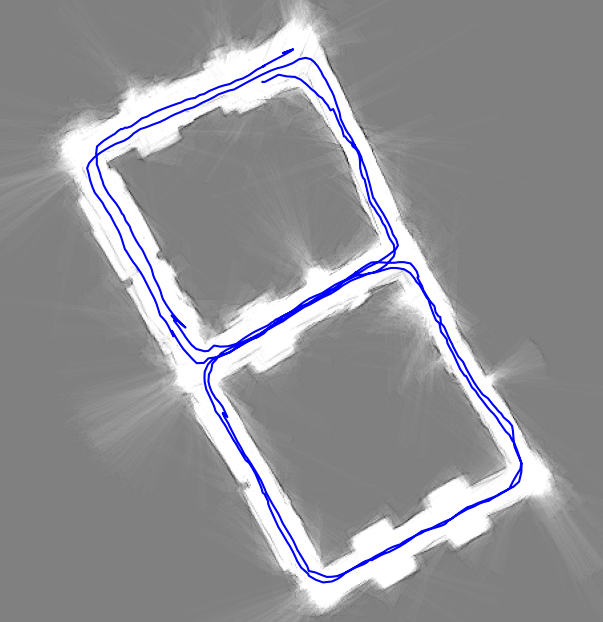
EECS 467 (Autonomous Robotics) Final Project: Large Scale Mapping with Loop Closure
(2022)
[
Project Page
]
[
Project Writeup
]
[
Video
]
[
Code
]
With John Rosner
Robotic mapping with iterative closest point scan matching, automatic loop closure detection, and pose graph optimization.
Occupancy Grid SLAM in JavaScript
(2021-2022)
[
Project Page
]
[
Code
]
A simulation of occupancy grid simultaneous localizaiton and mapping, with particle filter Monte Carlo localization. It's interactive, and it runs in your browser, so feel free to try it out!
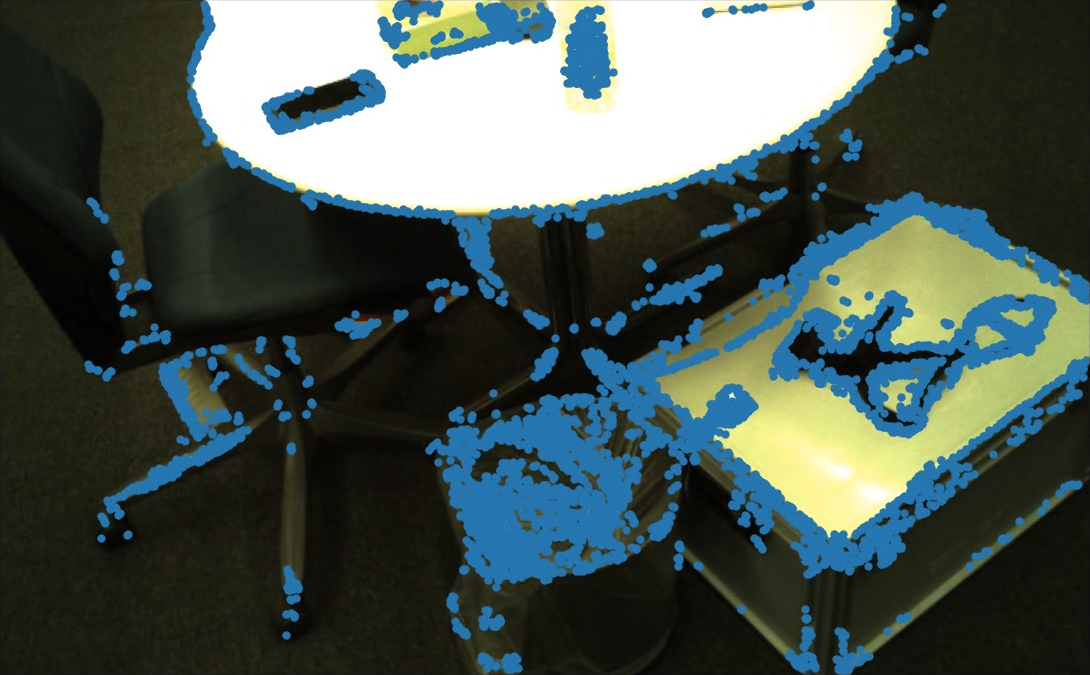
EECS 442 (Computer Vision) Final Project: Monocular Simultaneous Localization and Mapping
(2021)
[
Project Page
]
[
Project Writeup
]
[
Code
]
With Nicholas Konovalenko, Neil Gurnani, and James Doredla
Constructing a sparse 3d map with a single camera, by extracting image features and triangulating them across multiple video frames.

EECS 442 (Computer Vision) Course Projects
(2021)
[
Project Page
]
Assorted class projects for EECS 442 at the University of Michigan, including fitting homography transformations to warp and combine images, and performing semantic image segmentation with neural networks.
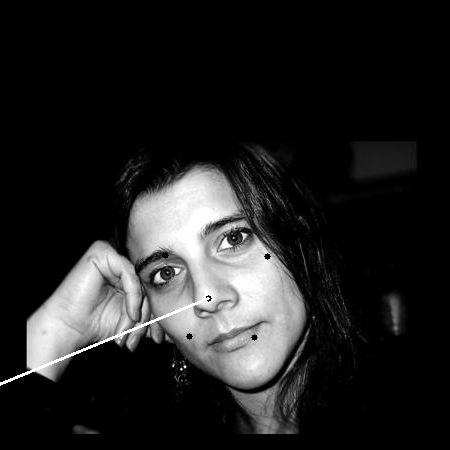
EECS 498-005 (Applied Machine Learning) Final Project: Head Pose Gesture Recognition
(2021)
[
Project Page
]
[
Project Writeup
]
[
Code
]
With Lance Ying
Tracking head pose (as obtained via facial landmarks) for gesture recognition.
EECS 367 (Intro to Autonomous Robotics) Course Projects
(2020)
[
Project Page
]
[
Video Playlist
]
Assorted class projects for EECS 367 at the University of Michigan, including A* search, forward and inverse kinematics, and RRT planning.

Interactive Piano Lights
(2020)
[
Project Page
]
[
Code
]
A maker project that reads MIDI output from an electric keyboard, in order to control LEDs.
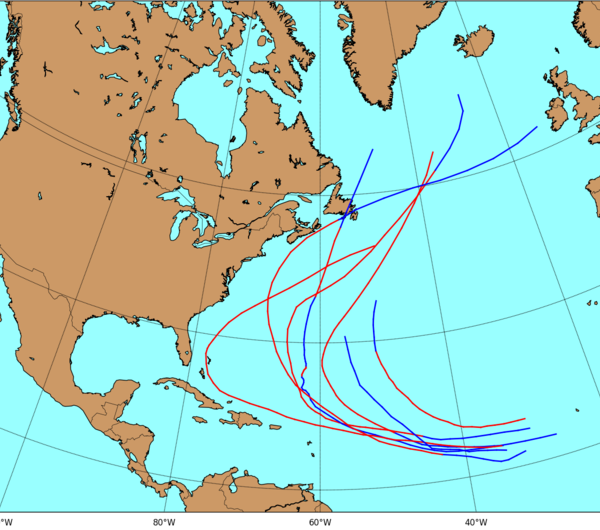
Stats 406 (Computational Statistics) Final Project: Hurricane Track Modeling via Manifold Learning
(2019)
[
Project Page
]
[
Project Writeup
]
[
Code
]
Modeling Atlantic hurricane tracks with manifold learning and nonparametric kernel regression.

Interactive Drum Lights
(2019)
[
Project Page
]
A maker project that detects drum notes with a piezoelectric sensor, in order to control LEDs.
Math Notes
I've partially or completely typset my lecture notes for several of the math classes I have taken. I've included links to Google Drive folders containing the PDFs, and links to the git repositories containing the LaTeX source files. (Classes are listed in reverse chronological order.)
- PDF Files LaTeX Source Math 635 (Riemannian Geometry) Taught by Professor Alejandro Uribe in 2021.
- PDF Files LaTeX Source Math 591 (Differentiable Manifolds) Taught by Professor Alejandro Uribe in 2020.
- PDF Files LaTeX Source Math 493 (Abstract Algebra/Group Theory) Taught by Professor Andrew Snowden in 2019
- PDF Files LaTeX Source Math 396 (Honors Analysis II) Taught by Professor David Barrett in 2019
- PDF Files LaTeX Source Math 565 (Graph Theory) Taught by Dr. Danny Nguyen in 2018
- PDF Files LaTeX Source Math 395 (Honors Analysis I) Taught by Professor David Barrett in 2018
- PDF Files LaTeX Source Math 217 (Proof-Based Linear Algebra) Taught by Dr. David Fernández Bretón in 2016
Interactive Javascript Demos
I've created several interactive javascript demos, which you can try out online (no downloads required). I recommend you access these on a computer -- I can't guarantee they'll work on a mobile device.